
|
Listen to this article |
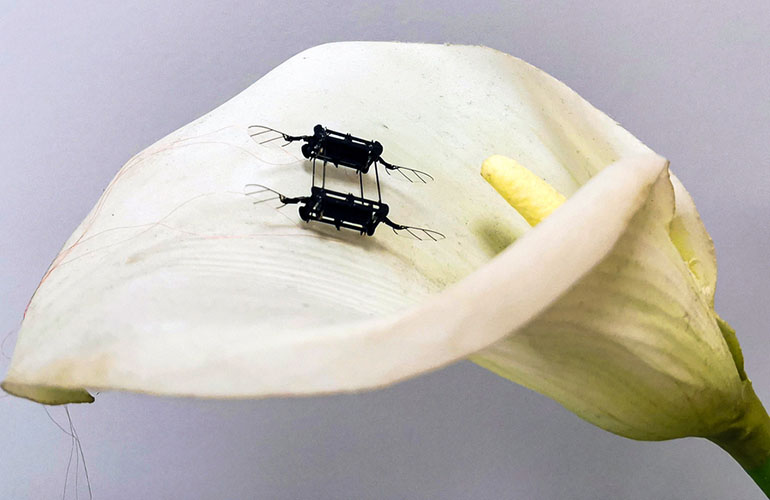
These nano drones use flexible actuators to fly through the air. | Source: MIT
MIT researchers have created a small robot, weighing less than a gram, that can move with insect-like agility and resilience. The research team isn’t the first to take on the challenge of crafting tiny flying robots. After all, they have a number of real-world applications, such as pollinating a crop field or finding survivors in disaster areas.
Typically, these types of robots are made with rigid actuators constructed from piezoelectric ceramic materials. Rigid materials help the robot to fly, but they also make it fragile. These types of robots are unlikely to survive the number of collisions they would experience in the real world.
Soft actuators can be much stronger than rigid actuators, but they present a different problem for small robots. They require higher voltages than rigid actuators, and more voltage means more power electronics that the robot is not able to lift.
Kevin Chen, assistant professor in the Department of Electrical Engineering and Computer Science and lead author of the study, worked with his team to create a new manufacturing technique for flexible actuators. The actuators produced operate at 75% lower voltage than current versions and can carry 80% more payload.
The team’s rectangular robot has four pairs of wings, each driven by an actuator, which beats nearly 500 times per second. Actuators function like artificial muscles and consist of layers of elastomer placed between two very thin electrodes and coiled in a spongy cylinder.
The wings beat by applying voltage to the actuator, causing the electrodes to squeeze the elastomer.
One fault after another
One of the challenges the team faced was creating more surface area for the robot. The actuator requires less voltage with a larger area, so the team tried to build as many thin elastomer and electrode layers as possible. However, the thinner the elastomer layers, the more unstable the robot.
The team was able to create layers that were only 10 microns thick by redesigning the manufacturing process. For example, during the spin coating process, where an elastomer is poured onto a flat surface and quickly rotated to form thinner film layers, the team had to deal with tiny air bubbles created by the process. centrifugation.
“In this process, the air flows back into the elastomer and creates many microscopic air bubbles. The diameter of these air bubbles is barely 1 micron, so previously we kind of ignored them, ”Chen said. “But when you get the layers that are thinner and thinner, the effect of the air bubbles becomes stronger and stronger. This is traditionally why people haven’t been able to do these super thin layers.
To work around this problem, the team performed the vacuum process after spin coating, before the elastomer had a chance to dry, and then fired the actuator to dry it. By solving this problem, the team was able to increase the actuator power output by over 300% as well as the actuator life.
Curing the elastomer layers also reduced the actuator curing time.
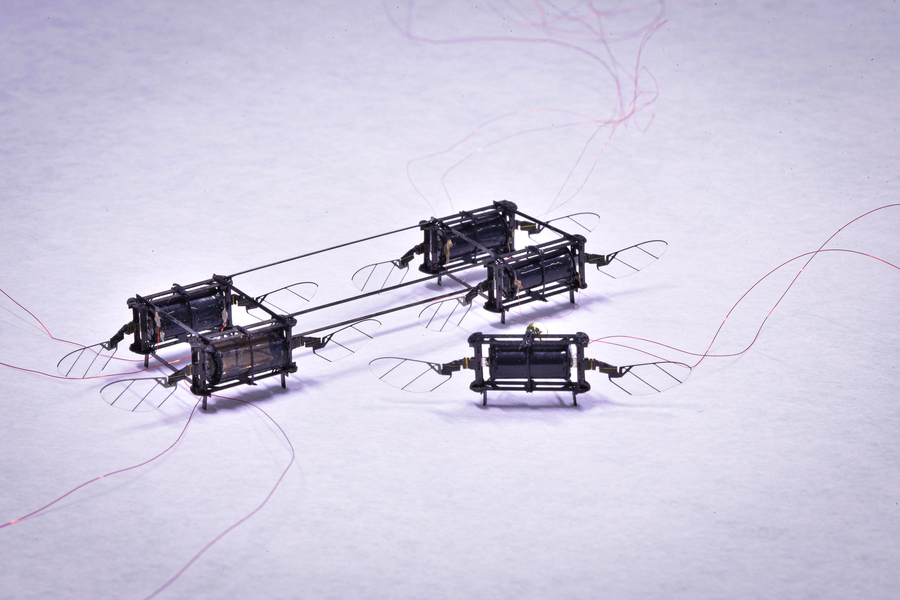
Artificial muscles improve the robot’s payload and allow it to achieve better hover performance. | Photo credit: Kevin Chen
“The first time I asked my student to make a multi-layered actuator, after I got to 12 layers, he had to wait two days for it to harden. It’s absolutely not durable, especially if you want to upgrade to more layers, ”Chen said.
The team also encountered issues with the thin actuator electrodes. The electrodes are made of carbon nanotubes about 1 / 50,000 the diameter of a human hair. The more nanotubes the actuator has, the higher the output power of the actuator.
The nanotubes, however, have sharp ends that could pierce the elastomer, so the team had to find the optimal number of nanotubes.
“Two years ago we created the strongest actuator and it could barely fly. We started to wonder if soft robots could compete with rigid robots? We observed one defect after another, so we kept working and solved one manufacturing problem after another, and now the soft actuator performance is catching up, ”Chen said. “They’re even a little better than the state-of-the-art rigid models. And there are still a number of manufacturing processes in materials science that we don’t understand. I am therefore very enthusiastic about the idea of continuing to reduce the actuation voltage.
The resulting robot could hover for 20 seconds. According to Chen, this is the longest ever recorded by a sub-gram robot. It also had a longer life than other actuators, lasting over two million cycles.
The team plans to continue testing manufacturing techniques in a cleanroom where they won’t have to deal with dust in the air while creating the actuator layers. Chen hopes to make the layers as thin as 1 micron.
Comments are closed.